*
 Disaster has struck! The 8 hours of driving the heavy 7" refractor on the MkIV mounting, for the Mercury transit, has damaged the synchronous Crouzet motor on the polar axis worm/wheel drive. It now vibrates instead of running normally. I presume there is some small spring which sends the motor turning the correct way. I dismantled the motor from the worm housing and finally its clip -on gearbox. Turning the shaft in either direction with the power connected does not help. Melted grease seems to have been forced through the worm housing bearing nearest the motor. The worm spins freely without end shake. Though the same probably cant be said for the engagement of the worm with its original bronze wormwheel. There was a lot backlash so I tightened it up. This may have been too much for the Crouzet motor and it may have overheated.
Disaster has struck! The 8 hours of driving the heavy 7" refractor on the MkIV mounting, for the Mercury transit, has damaged the synchronous Crouzet motor on the polar axis worm/wheel drive. It now vibrates instead of running normally. I presume there is some small spring which sends the motor turning the correct way. I dismantled the motor from the worm housing and finally its clip -on gearbox. Turning the shaft in either direction with the power connected does not help. Melted grease seems to have been forced through the worm housing bearing nearest the motor. The worm spins freely without end shake. Though the same probably cant be said for the engagement of the worm with its original bronze wormwheel. There was a lot backlash so I tightened it up. This may have been too much for the Crouzet motor and it may have overheated.
The motor is still listed for an incredibly high price [£130+p&p] from specialist UK motor dealers. For about the same money I could buy a new worm wheel set from Beacon Hill. Then add their synchronous drive motor for use with the Fullerscopes Skytracker VFO adjustable speed drive system.
 The 180mm, 7" 359-toothed Fullerscopes wormwheel is about 50 years old and made of bronze. It is still in usable condition but the worms are of plain steel and rust readily in normal [outdoor] use. I have had to wire brush the rust off repeatedly over the years I have owned both Fullerscopes mountings. [MkIV & MKIII] While Beacon Hill's worms are of stainless steel. A larger wormwheel could be added to the MkIV to reduce the torque required to drive the Polar Axis. This would force the use of a Beacon Hill motor because their tooth count is lower requiring a higher RPM on the drive motor to compensate. A slight doubt remains whether the Fullerscopes VFO could easily cope with the Beacon Hill motor.
The 180mm, 7" 359-toothed Fullerscopes wormwheel is about 50 years old and made of bronze. It is still in usable condition but the worms are of plain steel and rust readily in normal [outdoor] use. I have had to wire brush the rust off repeatedly over the years I have owned both Fullerscopes mountings. [MkIV & MKIII] While Beacon Hill's worms are of stainless steel. A larger wormwheel could be added to the MkIV to reduce the torque required to drive the Polar Axis. This would force the use of a Beacon Hill motor because their tooth count is lower requiring a higher RPM on the drive motor to compensate. A slight doubt remains whether the Fullerscopes VFO could easily cope with the Beacon Hill motor.
The difficulty with the Fullerscopes MkIV is the that both wormwheels are recessed to use up less axis/shaft space. This aids stability by reducing overhang beyond the bearings and also reduces the need for extra counter-weighting. The MkIVs use an internal rim clutch with Nylon pad forced into contact with a threaded rod and radio knob. Beacon Hill use a similar "clutch" pad but does not give any information on whether is is manually adjustable or having a "fixed" degree of friction. Beacon Hill's wormwheels seem to use a standard boss like a pulley. Which looks to be removable on some wheels. No doubt Barry could be persuaded to turn an internal rim on a larger boss to allow the MkIV's clutch to continue in the original form. Perhaps a shaft gripping pad is superior?

I'm not sure I really want to get involved in making another mounting even if I could obtain the pillow block bearings cheaply secondhand. It would want at least 2" shafts and needs solid bosses to connect the axles and saddle. Then add the two pairs of large wormwheel sets and drive motors...
So many questions raised from the failure of one, rather old, Crouzet synchronous motor!
An update: It is worse than I thought! The motor spins happily when connected directly to the mains. But the shaft and pinion oscillate rapidly when fed by the Skytracker VFO. Checking the connector block in the motor leads, with everything connected as normal, shows only 70V AC on my DMI.
 I opened up the control paddle and the PS box but there are no burnt or broken wires. Nor any sign of anything unusual to my eyes. I claim absolutely no expertise at electronics beyond the simplest testing. I'm more of a mechanical type. I even dismantled the motor DIN plug from the main PS box and this showed nothing awry. The motor showed the same symptoms upon reconnecting again. Presumably it lacks enough power to turn reliably.
I opened up the control paddle and the PS box but there are no burnt or broken wires. Nor any sign of anything unusual to my eyes. I claim absolutely no expertise at electronics beyond the simplest testing. I'm more of a mechanical type. I even dismantled the motor DIN plug from the main PS box and this showed nothing awry. The motor showed the same symptoms upon reconnecting again. Presumably it lacks enough power to turn reliably.
At least this gives me the option of a single speed polar drive if I connect the motor to an extension lead. Perhaps with a switch in-line.
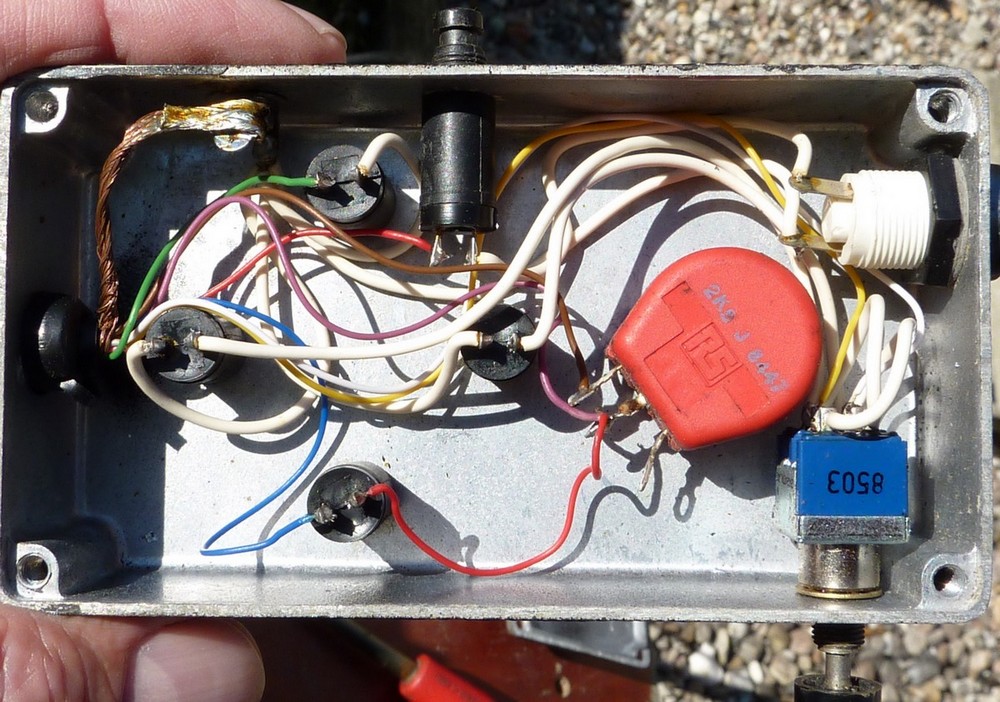
I am most grateful to a fellow amateur astronomer with advanced electronics skills for offering guidance to repairing the damage to the electronics. The power transistor at top center of the PCB has clearly overheated. Possibly due to poor heat sinking. It seems I have been drawing too much current from the control box to overcome high levels of friction in the bearings and wormwheels of my MkIV mounting. Fortunately the TIP31A transistors are readily available at low cost. I just hope my skills at soldering are up to the task. Or I may do more damage than I manage to repair!
Update: In the absence of the worm the MkIV's RA axis can turn freely. The axis brake only works via the worm's resistance to the wormwheel turning against its nylon pad brake. This makes the MkIV's use unnecessarily difficult. So I have replaced the RA worm, housing and motor. A simple mains extension lead will drive the motor until I have [hopefully] made repairs to the VFO drive control system. I have left the motor to run and checked the backlash and freedom repeatedly and all seems well. It is just that I no longer have any capability to adjust the speed of the RA drive nor that of the the Dec axis via the paddle.
Update 2: I removed the burnt transistor on the Skytracker PCB and replaced it with a new one. I have yet to test it or apply mains electricity.
Update3. The new transistor overheated too!
An update: It is worse than I thought! The motor spins happily when connected directly to the mains. But the shaft and pinion oscillate rapidly when fed by the Skytracker VFO. Checking the connector block in the motor leads, with everything connected as normal, shows only 70V AC on my DMI.

At least this gives me the option of a single speed polar drive if I connect the motor to an extension lead. Perhaps with a switch in-line.
I am most grateful to a fellow amateur astronomer with advanced electronics skills for offering guidance to repairing the damage to the electronics. The power transistor at top center of the PCB has clearly overheated. Possibly due to poor heat sinking. It seems I have been drawing too much current from the control box to overcome high levels of friction in the bearings and wormwheels of my MkIV mounting. Fortunately the TIP31A transistors are readily available at low cost. I just hope my skills at soldering are up to the task. Or I may do more damage than I manage to repair!
Update: In the absence of the worm the MkIV's RA axis can turn freely. The axis brake only works via the worm's resistance to the wormwheel turning against its nylon pad brake. This makes the MkIV's use unnecessarily difficult. So I have replaced the RA worm, housing and motor. A simple mains extension lead will drive the motor until I have [hopefully] made repairs to the VFO drive control system. I have left the motor to run and checked the backlash and freedom repeatedly and all seems well. It is just that I no longer have any capability to adjust the speed of the RA drive nor that of the the Dec axis via the paddle.
Update 2: I removed the burnt transistor on the Skytracker PCB and replaced it with a new one. I have yet to test it or apply mains electricity.
Update3. The new transistor overheated too!
Click on any image for an enlargement.
*
1 comment:
Hi Chris,
As I was reading your description of the problems I was beginning to wonder if the fault lay in the control unit rather than the motor, and I think your final test has confirmed that. Let's switch to email to pick up on this since I may be able to assist with a bit of remote diagnostics... Otherwise I can see you reaching for the lathe and turning up another creation or two from saucepan lids to replace key components! Actually having said that I have an idea: can you not create a stand upon which you rest your trike off the ground, and so arrange some gears and sprockets that you can sit on the saddle comfortably in eyepiece range, pedalling at your precise cadence, and thus effect geared-down rotation of the polar axis? This kills two birds with one stone by driving the scope and and avoiding you from having to battle with headwinds and muck spreaders whilst taking exercise... Just a thought to cheer you up again! All the best, Andrew
Post a Comment