 I
am still struggling with the final choice of a high or low RA wormwheel
position. In the lower position, on the bottom tip of the Polar Axis
shaft, the 11" diameter wheel overlaps the base plate. It also requires a
clamping bush to stop it literally falling off the end of the shaft. It
would be difficult to apply any extra clamping pressure to achieve a
supplementary clutch.
I
am still struggling with the final choice of a high or low RA wormwheel
position. In the lower position, on the bottom tip of the Polar Axis
shaft, the 11" diameter wheel overlaps the base plate. It also requires a
clamping bush to stop it literally falling off the end of the shaft. It
would be difficult to apply any extra clamping pressure to achieve a
supplementary clutch.
Placing
the RA wormwheel at the top of the Polar Axis, directly under the 7"
diameter cylinder, provides much more room. However, in this position it
increases the cantilever of the declination bearing housing by an extra
40mm. Or an increased height of about 1.5" above the top PA flange
bearing.
Given
the ample, 50mm shaft diameter I doubt this increased overhang has any
real meaning except cosmetic. Particularly as the shaft is only leaning
at 35° from the vertical at my 55° northerly latitude. A fork mounted on
the PA would cause a huge overhang in comparison with the modest
overhang of my German Equatorial design. Moreover, the disk on wheel
arrangement is commonly used in telescope mountings as the very stable,
pin and plate bearing. What I lose on the cantilever swings I gain on
the plate roundabouts. Top it is.
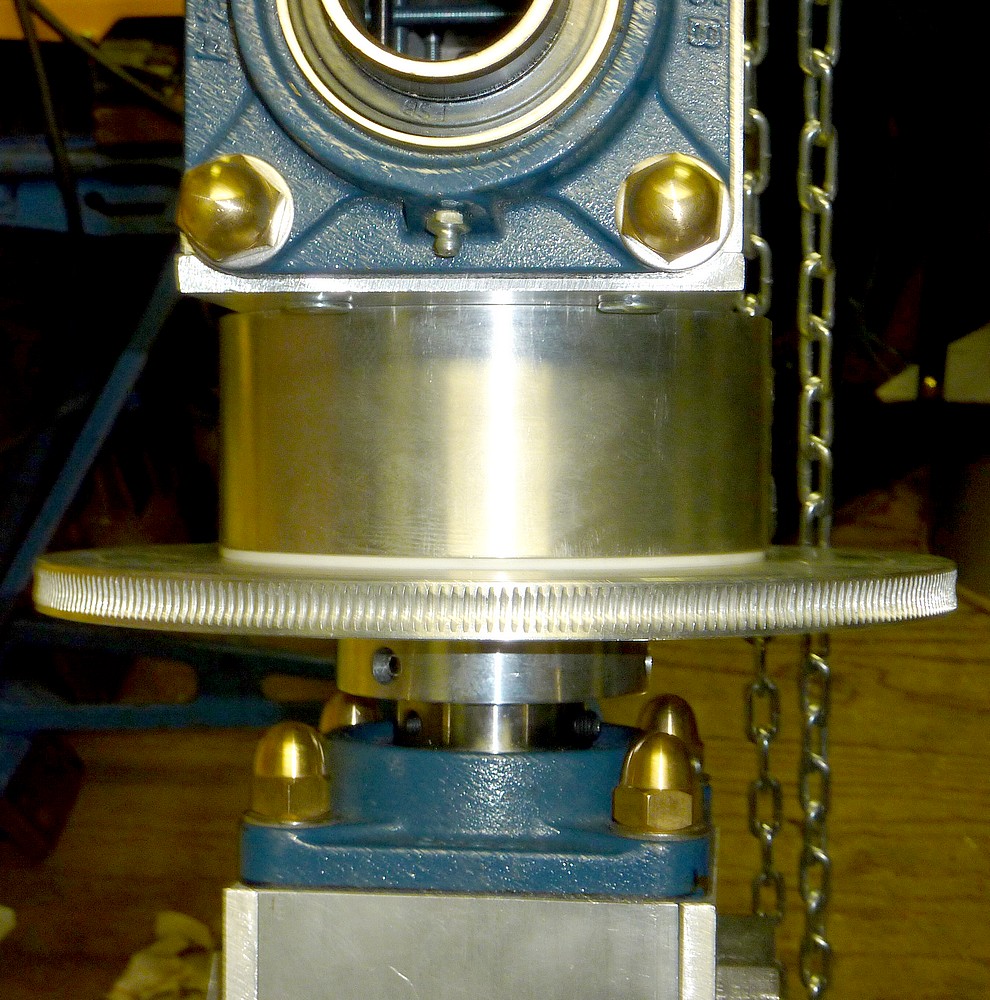
By
inserting a PTFE [US:Teflon] disk between the wormwheel and 7" junction
cylinder I gain a very large, slipping clutch. [see image] This would
provide more driving force without risking damage to the wormwheel
during manual or driven slews. The entire weight of the OTA and
Declination Axis would load this clutch disk. The Beacon Hill wormwheels
use three, radial nylon plugs in their hubs which rub on the axis for
their slipping clutches. Stainless steel grub screws provide adjustment
of friction levels. How these small pads would cope with a powerful
stepper motor during a Goto slew is anybody's guess.Chris Lord seemed to
suggest it wouldn't work with a heavy mounting and OTA.
Click on any image for an enlargement.
*
No comments:
Post a Comment